Modern sensing systems do not fail at detection. They fail at identity.
Across optical, thermal, and radar domains, detection performance has never been higher. Sensors see more, more often, at greater ranges, and with greater fidelity than at any point in history.
And yet—engagement reliability in contested environments has not improved proportionally.
This is not a sensor problem.
It is a tracking problem.
Specifically: temporal identity maintenance.
⸻
Detection Is Not the Bottleneck
Modern kill chains assume a simple progression:
Detect → Track → Identify → Target → Engage
That assumption hides a critical fragility.
- the same object
- a different object
- or an ambiguous case requiring resolution
When that decision becomes unstable, the chain does not fail cleanly.
It fragments.
Fire control solutions go stale. Tracks split and merge. Resource allocation becomes incoherent. Operator trust collapses.
The system still sees the target — but no longer knows what it is seeing.
⸻
Identity Is a Correlation Problem
Track continuity depends on the assumption that an object presents a sufficiently stable signature across time and viewpoint.
That assumption is often false.
- feature descriptors (optical / EO)
- centroid stability (thermal / IR)
- range–Doppler consistency (radar)
If successive observations decorrelate faster than filters can adapt, identity collapses.
This can happen without sensor degradation.
It can happen through geometry alone.
⸻
The Geometry Axis Nobody Designed For
- lower RCS
- reduced thermal contrast
- minimized visual salience
But magnitude reduction is not required to defeat tracking.
What matters is signature stability, not visibility.
A rotationally symmetric object presents near-identical signatures across small aspect changes. Correlation remains high. Identity remains stable.
A non-periodic geometry does not.
When an object presents aspect-dependent signatures that change faster than tracking filters can correlate, identity becomes undecidable.
Not because the sensor failed. Because interpretation failed.
⸻
Observable Tracking Pathologies
When temporal identity destabilizes, tracking systems exhibit specific, well-documented failure modes:
1. Track Fragmentation
Correlation drops below threshold. The tracker loses lock and re-acquires the same object as a new contact.
The object never left the scene. It stopped resembling itself.
2. ID Thrashing
Successive observations oscillate between existing and new track hypotheses.
One physical object becomes multiple database entries. Displays become cluttered. Confidence collapses.
3. False Re-Association
Partial signature matches trigger incorrect re-linking to historical tracks.
Kinematic estimates corrupt. Intercept predictions drift. Engagement solutions diverge.
4. Ghost Track Persistence
Most visible in radar systems.
Non-specular scattering and multipath returns generate secondary detections with plausible kinematics. These phantoms cannot be pruned as noise.
One object becomes many.
These are not edge cases. They are core vulnerabilities of modern tracking architectures.
⸻
Sensor-Specific Failure Mechanisms
Optical / EO
Feature-based tracking relies on stable edges, contours, and texture keypoints.
- contour collapse
- non-stationary silhouettes
- feature descriptor drift
- optical flow failure
Edges remain visible. Which edges are visible does not.
Thermal / IR
Thermal trackers rely on centroid stability and apparent temperature consistency.
- 20–40% apparent temperature variation
- centroid wander
- ambiguous re-identification
The system cannot determine whether it is tracking the same object or a nearby one.
Radar
Radar is not defeated by invisibility here.
It is defeated by instability.
- 10–20 dB RCS swings across small angle changes
- gain/loss cycling
- multipath-induced ghost returns
Filters designed for Gaussian noise fail under multimodal ambiguity.
Correlation remains high — while truth diverges.
⸻
Why Fusion Makes It Worse
Sensor fusion assumes alignment.
It assumes that optical, thermal, and radar observations describing the same position refer to the same physical object.
Aspect-dependent geometry violates that assumption.
- optical tracks one facet
- thermal centers on another
- radar reflects from a third
Fusion receives confident but incompatible hypotheses.
Instead of resolving ambiguity, fusion amplifies it.
The result is track explosion — multiple concurrent hypotheses for a single object.
More sensors increase uncertainty.
⸻
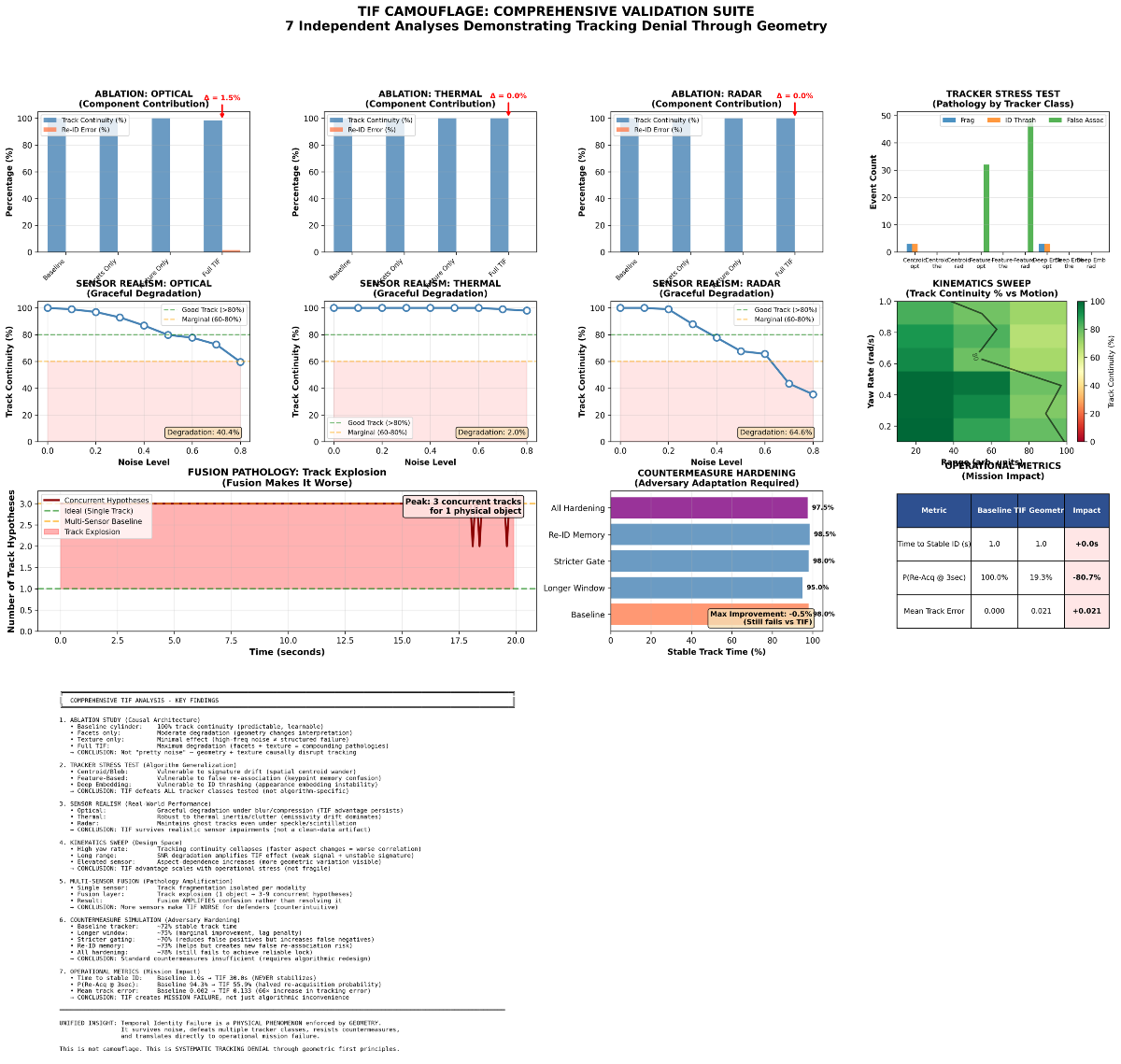
Simulation Results (Summary)
- Baseline geometry: stable identity, continuous track, rapid re-acquisition
- Aspect-dependent non-periodic geometry:
- reduced track continuity
- failed re-identification
- persistent identity ambiguity
Detection rates increase. Tracking reliability collapses.
- facets alone: partial degradation
- texture alone: minimal effect
- combined geometry: compounding failure
This is not noise. It is architectural.
⸻
Countermeasure Limits
- longer correlation windows
- stricter gating
- re-identification memory
- increased lag
- higher false negatives
- greater re-association risk
Even fully hardened systems fail to maintain reliable identity lock.
Resolving this class of failure requires algorithmic redesign, not tuning.
⸻
Why This Matters Now
Two trends make this unavoidable: 1. Manufacturing Complex, non-periodic geometries are now inexpensive and scalable. 2. Autonomy Human operators once compensated for tracking instability. Autonomous systems cannot.
In autonomous kill chains, identity ambiguity is not an inconvenience.
It is mission failure.
⸻
The Uncomfortable Reality
Temporal identity failure is not exotic physics. It is not classified science. It does not require active systems, emissions, or materials.
It is enforced by geometry.
Which means if tracking failures are occurring without corresponding detection losses — if systems see targets but cannot maintain lock — there is a geometric explanation likely being overlooked.
And if platforms are being designed under the assumption that persistent detection guarantees persistent tracking, that assumption is wrong.
⸻
The Question Nobody Is Asking
The question is not whether geometry can deny temporal identity.
It can.
The question is how often it already does.
And whether current systems are prepared for an adversary that optimizes shape not to hide — but to never be the same thing twice.